


Choreography of Dynamical Systems
Up-Up Stabilization
Motivation
We have developed an experimental test bed consisting of a double circular pendulum with a radio link to transmit position data from the two of the three shaft encoders. This eliminates wires and the friction effects that go along with them. We refer to this work as "choreography" but acrobatics would have been just as appropriate. The idea is to be able to give a linguistic input to the machine and have it execute the kind of swing up, rotate, balance, etc. sequences that one might expect from an Olympian on the parallel bars. Along the way we have learned something about problems involved in enlarging the domain of stability of nonlinear systems.

Encoder Radio
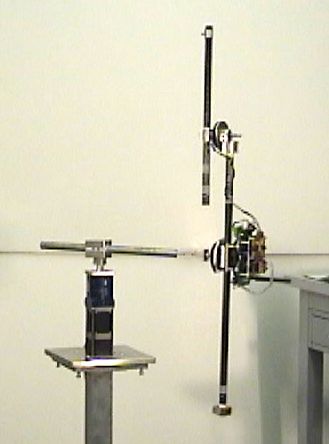
Apparatus
The pendulum consists of a horizontal arm and a vertical arm which are always orthogonal to one another. There is a servo motor driving the horizontal arm. The joint between the horizontal and vertical arm is a free joint. A rotary electric encoder is mounted on each of the joints. The encoder measures the absolute angular position (instead of incremental) and outputs analog signals. Then each analog signal is converted into 12bits binary number then sent to the host computer through a RS232 radio link, as shown in figure below. The radio link can send 50 readings of both the encoders per second which limits the sample frequency of the whole system to 50Hz. Each encoder has accuracy of .04 deg. The base of the pendulum is leveled with an error of .06 deg.